Maker Kit for SwiftIO de Madmachine
Autor: oscar gonzalez

Tiempo de lectura: 10 minutos
Kit de iniciación creado por Madmachine para programar microcontroladores con el lenguaje Swift de Apple
Maker Kit for SwiftIO de Madmachine
Autor: oscar gonzalez
0
Principiante
Potenciómetro y Servomotor
El último ejemplo que he probado consiste en tomar el valor de un potenciómetro utilizando una entrada analógica del controlador y mover un servomotor acorte a su valor. Esto da una buena idea de cómo podemos tomar el valor de una entrada y actuar en consecuencia mediante una lógica sencilla.
/*
Mission 8 Servo Motor
Turn the potentiometer and the angle of servo arm will change.
The circuit:
- Use Potentiometer Module and connect it to an Analog Jack.
- Most servo motors have the following three connections:
Black/Brown ground wire.
Red power wire (around 3.3V).
Yellow or White PWM wire.
- In this mission, we will connect the power and ground pins directly to the SwiftIO 3.3V and GND pins.
- The PWM input will be connected to one of the SwiftIO's digital output pins.
created 2019
by Orange J
Try to change the servo's movement to an opposite way.
Or, use a light sensor instead of the potentiometer. Then you reads how much light is present!
This example code is in the public domain.
Visit madmachine.io for more info.
*/
import SwiftIO
let a0 = AnalogIn(Id.A0) // Initialize the analog pin.
// Each cycle of the signal lasts for 20 milliseconds.
// The pulse should last between 0.5 and 2.5 milliseconds to activate the servo.
// With a 0.5ms pulse, the servo will turn to 0 degrees and with a 2.5ms pulse, it will at 180 degrees.
// In between, it is at an angle between 0%u2013180.
let servo = PWMOut(Id.PWM4A)
while true {
let value = a0.readPercent() // Read the analog value and return a value between 0.0 and 1.0.
let pulse = Int(500 2000 * value) // Calculate the value to get the pulse duration.
servo.set(period: 20000, pulse: pulse) // Set the servo position according to the scaled value.
sleep(ms: 100)
}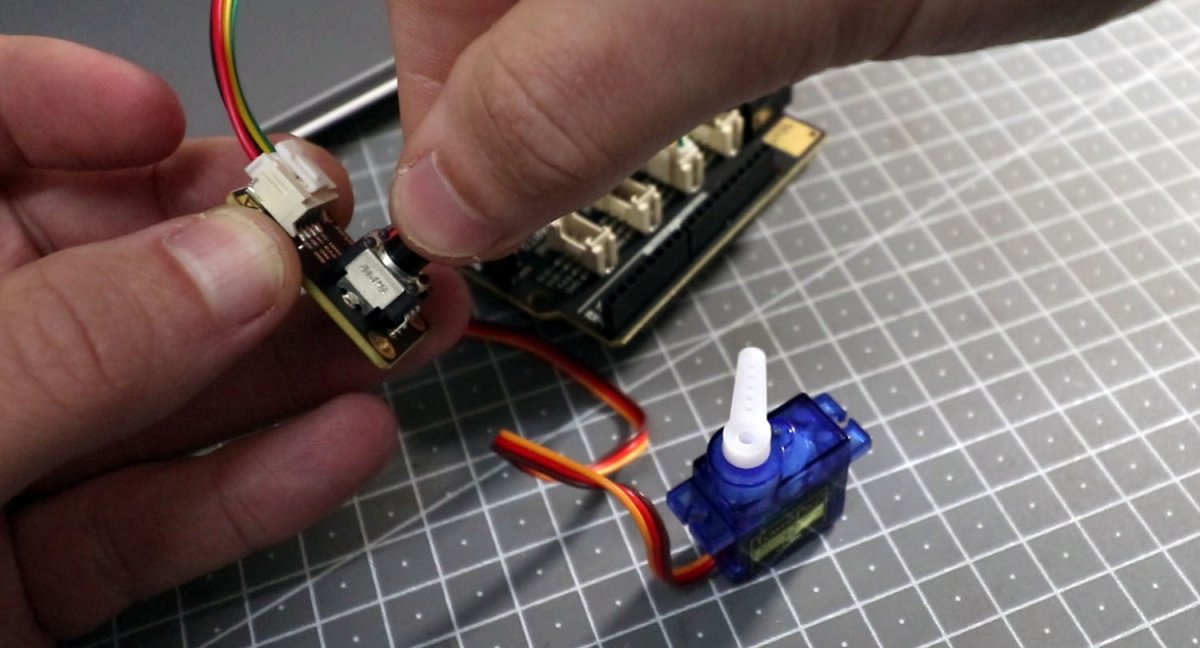
Ejemplo SwiftIO con potenciómetro y servomotor