Cómo construir un robot micromouse que resuelve un laberinto
Autor: oscar gonzalez
Tiempo de lectura: 34 minutos
Aprende todo lo que necesitas para montar tu propio robot resuelve laberintos, seleccionar los componentes y algunos trucos más
Cómo construir un robot micromouse que resuelve un laberinto
Efecto suelo y succión
Hasta ahora, hemos visto las principales partes de un robot microumouse para resolver un laberinto.
Ahora, si quieres que tu robot vaya lo más rápido posible, necesitas hacer algo más. Y lo primero que puedes pensar es poner motores que giren más rápido. Eso, por supuesto, es muy útil y eficaz, pero tiene un problema relacionado con la física.
Es el mismo problema que intentan combatir los coches de fórmula 1 y es que cuanta más velocidad pretendas alcanzar, juegan en contra tuya (de tu robot) el drift.
¿Qué es el drift?
Bueno, es bastante sencillo de entender, ya que para simplificarlo al máximo, si vas más rápido, las ruedas resbalan sobre el suelo y pierdes el control. Y eso no es nada bueno para tu robot.
Pero ese problema tiene una solución muy interesante e ingeniosa que te voy a contar en un momento.
Y precisamente hablando de fórmula 1, remontemos a año 1978 donde apareció un coche de revolucionario llamado Brabham BT46B, un monoplaza diseñado por Gordon Murray para el equipo Brabham.

Imagen: https://www.tracksidelegends.com/articles/brabham-f1-fan-car-BT46B
Este monoplaza tubo dos versiones y la que nos interesa es la versión B del monoplaza, también conocida como "autoventilador", que se presentó en el Gran Premio de Suecia de 1978 con un potente motor Alfa Romero de 12 cilindros.
En un primer momento, se pensó que ese enorme ventilador era de refrigeración, pero nada más lejos de la realidad. Lo que escondía realmente debajo era un aspirador gigante.
¿Qué se conseguía con eso?
Lo que hacía en realidad era aspirar con fuerza el aire que está debajo del coche. Gracias a eso, generaba una fuerza de succión enorme por debajo del coche, haciendo que se pegue mucho más al suelo. De esa forma, era capaz de tomar las curvas mucho más rápido y no perder tracción.
Y eso es exactamente lo que se puede hacer con un robot micromouse, aunque debes tener en cuenta varias consideraciones.
Y si te mola el tema, te dejo un vídeo explicación del genial sistema del Brabham BT46B y luego vemos cómo puedes aplicar un sistema similar a tu robot resuelve laberintos.
Micromouse Vaccum
Ahora que ya sabemos un truco más para pegar tu robot al suelo y poder ir más rápido con un control más preciso, también debes saber que esto no viene gratis. Me refiero a que incrementa la complejidad del robot, así como el consumo total de energía. Aunque todo eso lo veremos en el apartado de alimentación más adelante.
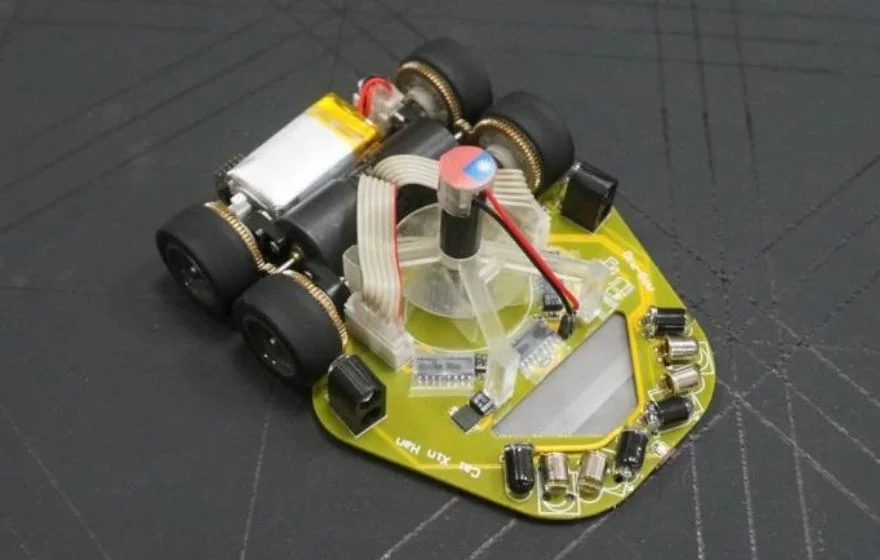
Microumouse Diu Gow 4 (Taiwan 2015)
Como puedes comprobar en la imagen superior, el montaje de un ventilador ocupa bastante espacio en el robot, pero sin duda merece la pena montarlo, especialmente si piensas en competir.
Una de las mejores opciones para montar este tipo de sistemas es utilizar motores de dron que tengan altas revoluciones y funcionen a un voltaje nominal igual a la batería de tu robot.
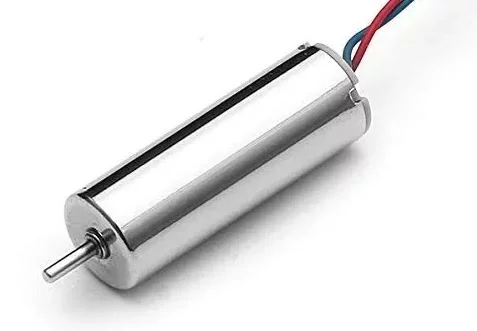
Micromotor 50.000 RPM

Micromotor 8.5x20mm 46000 RPM (4 unidades)
Son 4 motores de dron de 3.7V asombrosamente pequeños para las 46000 RPM que pueden alcanzar
13,90€
Con este tipo de motores y una buena hélice, puedes conseguir que el robot se pegue al suelo y ganar mucha tracción, aunque en contrapartida, subirás un poco el centro de gravedad y consumirás mucha más corriente.
Ten en cuenta que el espacio para la batería es limitado y si consumes demasiado, es posible que tu robot se quede sin energía suficiente para completar el laberinto.
Un buen truco, aparte de los que veremos en el apartado de alimentación, es programar tu robot para usar el ventilador solo cuando sea necesario.
Por ejemplo, cuando haces el primer recorrido de reconocimiento, no es necesario activar el ventilador, ya que normalmente no se va rápido. Luego, cuando el robot ya encuentre el camino correcto, lo suyo es tener algún tipo de botón o función para indicarle que lo active para hacer la vuelta rápida.
No hay nada escrito ni planos concretos de cómo hacerlo, así que te toca ser creativo con tu montaje. Puedes ayudarte de piezas impresas en 3D para hacer la montura según el motor y la hélice que utilices.

Para que puedas ver la gran mejora en tracción que puedes generar con un sistema de vacío, puedes ver los gráficos de un estudio que hizo Peter Harrison con su micromouse, comparando una vuelta por el laberinto sin el ventilador activado y otro con él activado.
Esta es la gráfica de datos con el ventilador apagado:
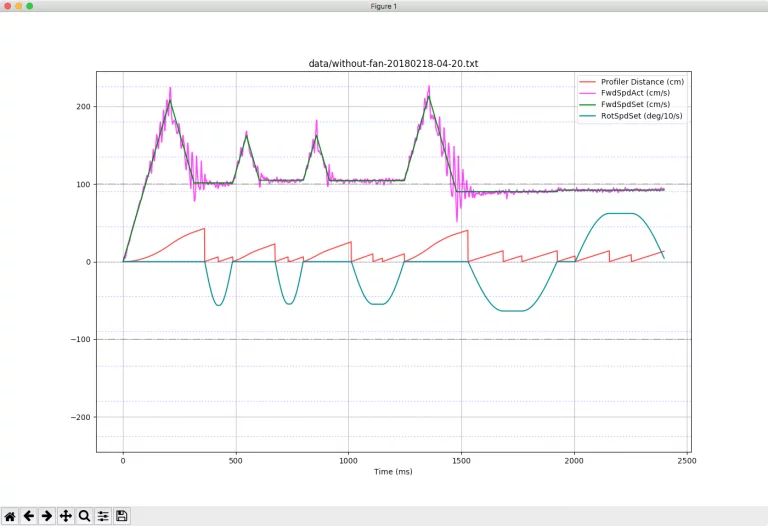
Sin el ventilador
La línea verde es la velocidad solicitada del robot y la magenta la velocidad medida por los encoders de las ruedas (la velocidad real). Como se puede ver, los motores intentan seguir la curva solicitada con una razonable precisión.
Ahora veamos qué pasa al activar el ventilador de succión en el mismo circuito y cómo afecta a la precisión en cuanto a la velocidad del robot:
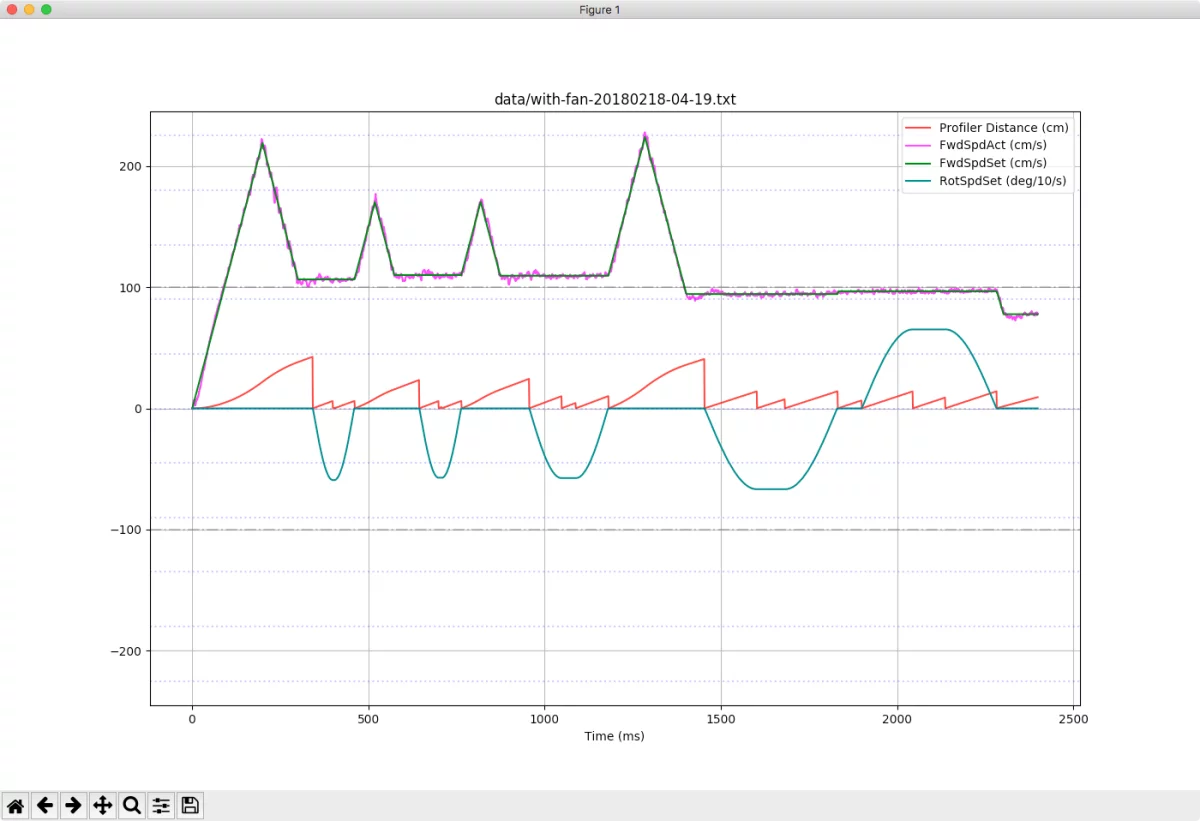
Con el ventilador de succión activado
Se puede ver claramente que el robot gana mucho más control en la relación de velocidad solicitada y velocidad real. Esto sin duda es una ventaja competitiva importante para tu robot.
Y ahora que lo tienes claro, debes conoces las implicaciones a nivel de consumo de energía que eso conlleva y para eso, te voy a contar algunos trucos muy interesantes sobre la alimentación en la siguiente página.