Mini Robot Tanque con ESP32
Autor: oscar gonzalez
Tiempo de lectura: 11 minutos
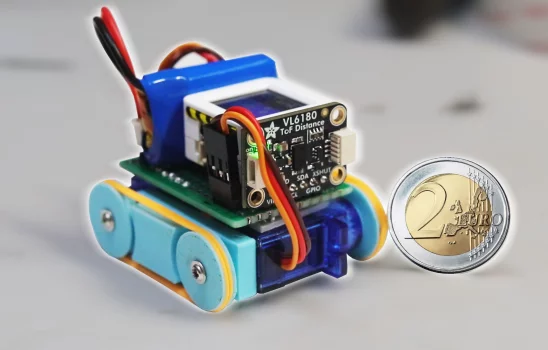
Pequeño robot tanque con control remoto basado en ESP32 ATOM S3 de M5Stack
- Etiquetas
Mini Robot Tanque con ESP32
Materiales
El núcleo, el cerebro, el centro de todo el robot es un ESP32 ATOM S3 de M5 Stack. Es un dispositivo muy interesante y sobre todo muy compacto que tiene Wifi integrada, un IMU de 6 ejes MPU6886 y una pantalla LCD.
Lo mejor es que es muy pequeño, ya que tan solo mide 24 x 24 milímetros y es perfecto para el mini tanque. Puedes usar otras variantes de ATOM (la hay sin pantalla) o incluso otra ESP32, pero tendrás que cablearlo acorde a lo que le pongas.
Lo importante es que sea un ESP32 o ESP8266 porque será imprescindible para poder controlarlo remotamente, como veremos más adelante en la parte de programación.
El modelo original de Paco Carabaza usa un ESP8266 y también vale sin problema. Ten en cuenta también que en tan poco espacio, no es posible tener un circuito de carga para la batería, así que tendrás que cargarla de forma externa con un cargador.
En mi caso he usado una batería LiPo de 3.7 y 300 mAh queda una autonomía más que suficiente para jugar con el robot durante un buen rato. Pero puedes usar la que quieras, siempre que sea de 3.7V y entre dentro del tanque.
Te dejo un par de opciones aquí y aquí. Y si no tienes un cargador para recargarlas, este es el cargador LiPo que uso yo.
Aquí abajo te dejo la lista de materiales que necesitarás.

M5Stack ATOM ESP32-S3R
ATOM-S3 ESP32 con pantalla LCD IPS muy compacto y de ultra bajo consumo ideal para proyectos de IoT
20,95€
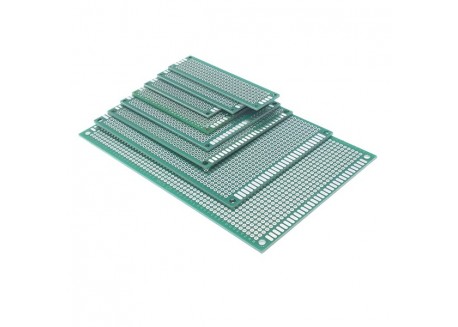
Kit 8 Placas PCB Doble Cara Perforadas para Prototipos.
Kit compuesto por 8 Placas PCB de doble cara para prototipado.
5,95€


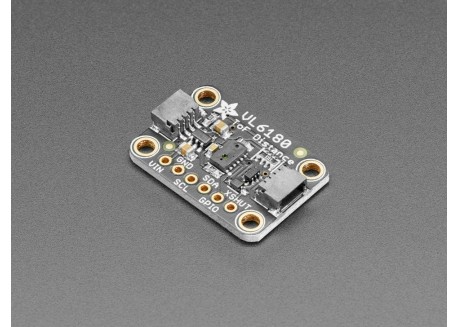
Sensor de distancia láser VL6180X
Sensor de distancia láser muy preciso basado en el chip VL6180X con bus I2C con un rango de 5 a 100mm
16,50€

Bobinas de cable 22AWG con dispensador
Caja con 6 bobinas de cable de silicona de colores con sistema dispensador y accesorios. Diámetro: 22AWG (0.64mm)
11,95€

Batería Lipo 300mAh / 3.7V - 602030
Batería Lipo (Polymer Lithium) de alta calidad y capacidad de 300mAh, modelo 602030. Este tipo de baterías proporciona una fuente de alimentación muy eficiente. Protegida con Circuito de Control.
3,50€

M5Stack - ESP32 Basic Core IoT Kit v2.7
Plataforma de desarrollo y prototipado rápido M5Stack con conectividad Wifi y Bluetooth basada en ESP32
42,90€
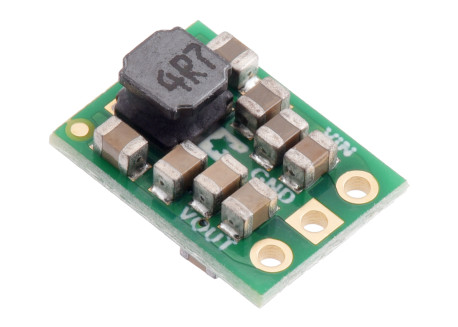
Conversor Step-Up/Step-Down 5V/1.5A S13V15F5
Convertidor de voltaje Step-Up/Step-Down de salida fija de5V con una intensidad máxima de 1.5 Amperios
9,50€
Servos de rotación continua
Dependiendo del tipo de servos que utilices, es posible que tengas que hacer algunas modificaciones primero.
El robot necesita servos de rotación continua. Yo en mi caso tenía unos FS90R que ya son de rotación continua y no tuve que hacer nada. Pero si tienes los clásicos servos SG90, puedes modificarlos para también giren continuamente.
El proceso es muy sencillo y te lo explico a continuación. Luego, opcionalmente y, ya que estás con las manos en la masa, también puedes acortar un poco los cables porque suelen ser muy largos y al final estorban al funcionamiento del robot. Con un cable de unos 3 o 4 centímetros es más que suficiente y quedará muy compacto.
Piezas impresas en 3D
Las piezas impresas las puedes descargar desde thingiverse. Son dos soportes para los servos y las ruedas que lleva imprimir apenas media hora. Puedes usar PLA o PETG, aunque te recomiendo que tengas al menos 3 perímetros para que sean más resistentes.
Dos de las ruedas irán en el eje de cada servo y las otras dos son ruedas locas de apoyo.
En la web de thingiverse también tienes una opción de orugas para usar con filamento flexible. Yo voy a montar la versión con ruedas para luego añadirle unas gomas o juntas tóricas.
Para las ruedas, vas a necesitar o bien unas gomas de 5 o 6 cm o bien unas juntas tóricas. Ten en cuenta que la placa perforada PCB vas a tener que cortarla al tamaño más o menos del chasis. Ahí es donde soldaremos todos los componentes y eso lo vamos a ver en detalle en la siguiente página.
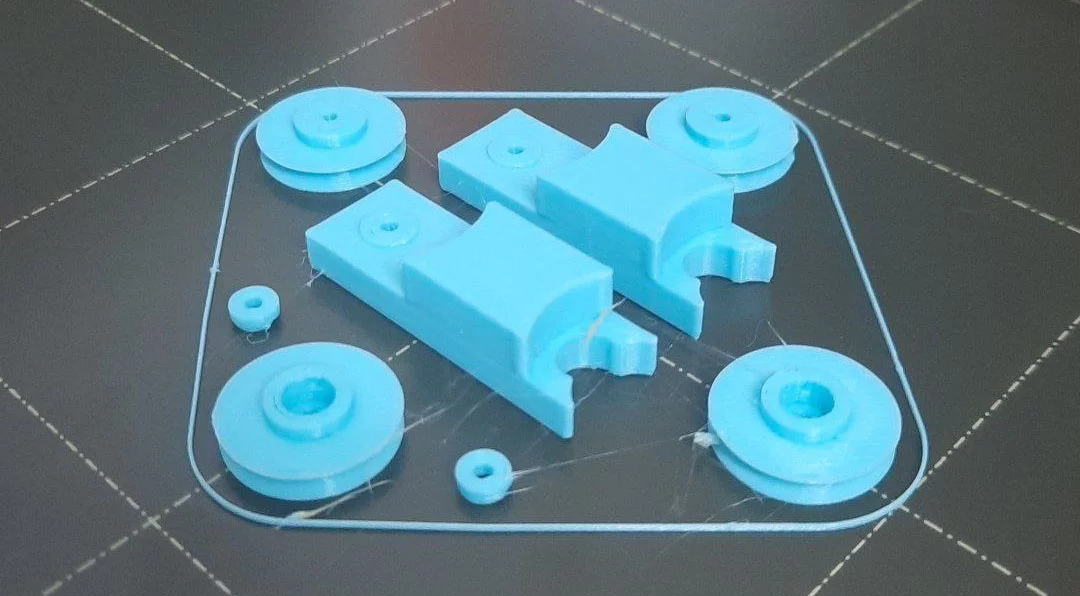
Piezas impresas en 3D para el mini tanque